キーマップの設定により同時に異なる赤外線信号が送信できます。
例) X1キーが押されたときに赤外線信号FWDA,FWDCが送信される。
| ハンドル | ななしの |
|---|---|
| メールアドレス | nanashi@yk.rim.or.jp |
| ホームページ |
無印非売品 http://www.yk.rim.or.jp/~nanashi/ |
TransMagicなどを使用してwc.fxとwc.cfgをワンダースワンへ転送してください。
wc.cfgはWonderWitch転送形式でないので「転送形式に変換するためのダイアログ」が
表示されますが、そのままの転送してください。
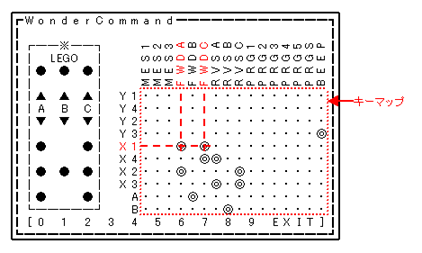
シェル(Megなど)から「ワンダーコマンド」を起動してください。
X1-X4,Y1-Y4,A,Bキーを押すことにより、
キーマップ上の「◎」で対応した赤外線信号が送信されます。
キーマップの設定により同時に異なる赤外線信号が送信できます。
例) X1キーが押されたときに赤外線信号FWDA,FWDCが送信される。
| 赤外線信号 | 動作 | 備考 |
|---|---|---|
| MES1 | Message1を送信 | |
| MES2 | Message2を送信 | |
| MES3 | Message3を送信 | |
| FWDA | ポートAのモータを正転 | キーリピートあり |
| FWDB | ポートBのモータを正転 | |
| FWDC | ポートCのモータを正転 | |
| RVSA | ポートAのモータを逆転 | |
| RVSB | ポートBのモータを逆転 | |
| RVSC | ポートCのモータを逆転 | |
| PRG1 | プログラム1を実行 | |
| PRG2 | プログラム2を実行 | |
| PRG3 | プログラム3を実行 | |
| PRG4 | プログラム4を実行 | |
| PRG5 | プログラム5を実行 | |
| PRGS | 実行中のプログラムを終了 | |
| BEEP | ビープ音を鳴らす |
STARTキーを押した後にX2,X4キーを操作して0〜9を選びAキーを押してください。 STARTキーを押した場合は選択がキャンセルされます。
STARTキーを押した後にX2,X4キーを操作してEXITを選びAキーを押してください。 STARTキーを押した場合は選択がキャンセルされます。
パソコン上のテキストエディタを使用してwc.cfgファイルを変更することにより
キーマップの変更ができます。
リモートコントロールするロボットに合わせて変更してみて下さい。
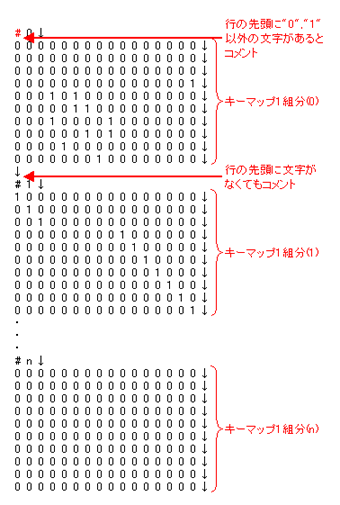
16個の"0"(・),"1"(◎)を1行に記述して10行で1組分のキーマップになります。
記述順はWonderCommand起動中に表示されているキーマップの配置と同じです。
1組分のキーマップは記述順に0〜9のキーマップに格納されます。
記述が10組より少ない場合それ以降のキーマップは全て"0"で埋められます。
なお行の先頭が"0","1"以外の場合(文字がなくても)コメントとして扱われます。
「ワンダーコマンド」起動時にwc.cfgファイルがオープンできない場合は
デフォルトのキーマップが使用されます。
「モニタモードメニュー」(「WonderWitch取扱説明書」「3.4.2モニタモードメニュー」参照のこと)の 「Setupメニュー」で設定されたSleep時間の間キー入力が無いとスリープモードに移行します。 (ただしキーマップ変更時などは除く) 任意のキーを入力するとスリープモードから復帰します。
| 動作機種 |
ワンダースワン ワンダースワンカラー |
|---|---|
| OSバージョン |
1.0.3 1.1.0 |
| その他 | 拡張ハードウェア必須 |
LEGO MindStorms ROBOTICS INVENTION SYSTEMで作ったロボットを ワンダースワンでリモートコントロールする。
拡張ハードウェアの
小型化(ワンダーウェーブのケースに収納)と省電力化(マイコンのIdle Mode対応)
省電力化により未使用時の消費電力を2〜3[mW]に抑えています。
| シェル(Meg)実行時 | ワンダーコマンド実行時 | ||||
|---|---|---|---|---|---|
| スリープ | キー操作待ち | スリープ | キー操作待ち | 赤外線信号送信 | |
| ワンダースワン+拡張ハードウェア | 39[mW] | 41[mW] | 41[mW] | 44[mW] | 71[mW] |
| ワンダースワンのみ | 37[mW] | 39[mW] | - | - | - |
| ワンダースワンカラー+拡張ハードウェア | 71[mW] | 81[mW] | 76[mW] | 87[mW] | 124[mW] |
| ワンダースワンカラーのみ | 68[mW] | 78[mW] | - | - | - |